در مقایسه با روبات های چرخ دار، ساختار دوپا و توانایی ورزشی عالی به ربات های انسان نما داده شده است. بسیاری از الگوریتم های ربات دوپا مانند کنترل تعادل و سینماتیک معکوس توسعه یافته اند [1،2،3]. نقطه لحظه صفر (ZMP) و تجزیه و تحلیل دینامیک راه رفتن را می توان برای فعال کردن یک ربات برای راه رفتن پیوسته استفاده کرد [4،5،6،7]. با این حال، این روش ها نیاز به محاسبات فراوان دارند. محققان باید یک مدل دینامیکی تقریبی یا ساده ایجاد کنند. با این حال، از آنجا که یک مدل دینامیکی بیش از حد ساده شده منجر به خطاهای تخمین می شود، یک مدل تقریبی مناسب برای تضمین راه رفتن ثابت مورد نیاز است. یک مدل آونگ معکوس خطی [8،9] پیشنهاد شد، و یک کنترل پیش نمایش را توسعه داد که ZMP یکپارچه برای اصلاح خطاهای ناشی از مدل ساده شده [10،11] است. با این حال، روش های فوق را نمی توان برای بسیاری از ربات های انسان نما با اندازه کوچک که ظرفیت محاسباتی محدودی دارند، اعمال کرد. بنابراین، برخی از کنترل های الهام گرفته از بیولوژیکی بر اساس سیستم های عصبی پیشنهاد شد. ژنراتورهای الگوی مرکزی (CPG) برای تأثیرگذاری بر حرکت ریتمهای بیولوژیکی مورد استفاده قرار گرفتهاند. نورون های حرکتی سیگنال های نوسانی خود به خود و ثابت را از طریق شبکه های بازداری متقابل و فعال سازی ثابت تولید می کنند. حرکت منظم ریتمیک توسط راه رفتن های ثابت ایجاد می شود به طوری که ویژگی های نوسانگر برای ارائه CPG در فضای کاری مناسب است [12]. از طریق وضعیت خود یا بازخورد از محیط، مدل های حرکتی را می توان تنظیم کرد. چندین نوع تحقیق از ZMP یا برآورد نگرش برای بررسی اینکه آیا حرکت ربات از مدل راه رفتن ایجاد شده توسط CPG پیروی میکند [13] و حرکت برای حفظ تعادل [14] تنظیم شده است، استفاده کردهاند. علاوه بر این، برخی از انواع تحقیقات برای کنترل تغییرات دینامیکی ربات با استفاده از مرکز جرم (COM) و مرکز فشار (COP) پیشنهاد شدهاند [15،16]. روش راه رفتن نیز نوعی رفتار نوسانی است [17] که می تواند توسط یک مدل نوسان ساز ایجاد شود و می تواند با گام برداشتن پای چپ و راست ایجاد شود [18]. از این رو، راه رفتن پله را می توان با پارامترهای نوسانگر توصیف کرد. این مطالعات ربات ها را قادر به دستیابی به مدل های دینامیکی ایده آل کرده است. به طور مشابه، CPG ها مدل های ایده آل راه رفتن و جبران حسگرها را ایجاد کرده اند تا ربات ها بتوانند به طور پیوسته راه بروند.
هنگامی که یک نیروی خارجی به اندازه کافی قوی باشد که به ربات اجازه دهد تعادل خود را از دست بدهد و سقوط کند، روش کنترل تعادل پیشنهادی برای محاسبه در برابر این حالت ناپایدار فعال می شود. این روش پیشنهادی از مدل آونگ معکوس خطی با ترکیب یک چرخ طیار [19،20] برای جلوگیری از سقوط، به ویژه در جهت ساژیتال، که می تواند به شدت نوسان کند، مشتق شده است. هنگامی که ربات تحت تاثیر یک نیروی خارجی معقول قرار می گیرد، موقعیتی بر روی زمین به نام نقطه گرفتن پیدا می شود تا تعادل خود را حفظ کند. اگر ربات یک پای خود را دراز کند و روی آن نقطه گرفتن قدم بگذارد، تعادل را می توان دوباره به دست آورد. روش کنترل تعادل پیشنهادی به طور کامل بر روی یک ربات انساننما با اندازه کوچک واقعی آزمایش شد و تنها یک ضربه روی ربات برای نشان دادن عملکرد آن اتخاذ شد. همچنین برخی شبیهسازیها از رباتهای انساننما [21،22]، و شبیهسازی کنترل تعادل بازیابی فشار [23،24] وجود داشت، اما دادههای راستیآزمایی عملیات واقعی کمیاب است.

منابع
- Li, T.H.S.; Su, Y.T.; Liu, S.H.; Hu, J.J.; Chen, C.C. Dynamic balance control for biped robot walking using sensor fusion, Kalman filter, and fuzzy logic. IEEE Trans. Ind. Electron. 2012, 59, 4394–4408. [Google Scholar] [CrossRef]
- Wong, C.C.; Liu, C.C. FPGA realisation of inverse kinematics for biped robot based on CORDIC. Electron. Lett. 2013, 49, 332–334. [Google Scholar] [CrossRef]
- Lai, W.Z.; Huang, H.P.; Chen, J.H. Real-time control of a humanoid robot. In Proceedings of the International Conference on Advanced Robotics and Intelligent Systems, Taipei, Taiwan, 6–8 September 2017; pp. 17–23. [Google Scholar]
- Vukobratovi’c, V.; Borovac, B. Zero-moment point-thirty five years of its life. Int. J. Humanoid Robot. 2004, 1, 157–173. [Google Scholar] [CrossRef]
- Chang, Y.H.; Oh, Y.; Kim, D.; Hong, S. Balance control in whole body coordination framework for biped humanoid robot MAHRU-R. In Proceedings of the IEEE International Symposium on Robot and Human Interactive Communication, Munich, Germany, 1–3 August 2008; pp. 401–406. [Google Scholar]
- Tu, K.Y.; Liu, M.S. Planning of sagittal gait of biped robots based on minimum motion energy. Int. J. Hum. Robot. 2010, 7, 635–667. [Google Scholar] [CrossRef]
- Hu, Y.; Mombaur, K. Bio-inspired optimal control framework to generate walking motions for the humanoid robot iCub using whole body models. Appl. Sci. 2018, 8, 278. [Google Scholar] [CrossRef][Green Version]
- Kajita, S.; Morisawa, M.; Miura, K.; Nakaoka, S.; Harada, K.; Kaneko, K.; Kanehiro, F.; Yokoi, K. Biped walking stabilization based on linear inverted pendulum tracking. In Proceedings of the IEEE/RSJ International Conference Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 4489–4496. [Google Scholar]
- Kim, S.H.; Lee, B.; Hong, Y.D. Stability control and turning algorithm of an alpine skiing robot. Sensors 2019, 19, 3664. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Kajita, S.; Kanehiro, F.; Kaneko, K.; Fujiwara, K.; Harada, K.; Yokoi, K.; Hirukawa, H. Biped walking pattern generation by using preview control of zero-moment point. In Proceedings of the IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; pp. 1620–1626. [Google Scholar]
- Joe, H.M.; Oh, J.H. A robust balance-control framework for the terrain-blind bipedal walking of a humanoid robot on unknown and uneven terrain. Sensors 2019, 19, 4194. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Liu, C.; Wang, D.; Chen, Q. Central pattern generator inspired control for adaptive walking of biped robots. IEEE Trans. Syst. Man Cybern. Syst. 2013, 43, 1206–1215. [Google Scholar]
- Ha, I.; Tamura, Y.; Asama, H. Gait pattern generation and stabilization for humanoid robot based on coupled oscillators. In Proceedings of the IEEE/RSJ International Conference Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 3207–3212. [Google Scholar]
- Yang, W.; Kim, H.; You, B.J. Biologically inspired self-stabilizing control for bipedal robots. Int. J. Adv. Robot. Syst. 2013, 10, 1–12. [Google Scholar] [CrossRef][Green Version]
- Kajita, S.; Kanehiro, F.; Kaneko, K.; Fujiwara, K.; Yokoi, K.; Hirukawa, H. Biped walking pattern generation by a simple three dimensional inverted pendulum model. Adv. Robot. 2003, 17, 131–147. [Google Scholar] [CrossRef]
- Seyde, T.; Shrivastava, A.; Englsberger, J.; Bertrand, S.; Pratt, J.; Griffin, R.J. Inclusion of angular momentum during planning for capture point based walking. In Proceedings of the IEEE International Conference on Robotics and Automation, Brisbane, Australia, 21–25 May 2018; pp. 1791–1798. [Google Scholar]
- Tran, D.H.; Hamker, F.; Nassour, J. A humanoid robot learns to recover perturbation during swinging motion. IEEE Trans. Syst. Man Cybern. Syst. 2018, 1–12. [Google Scholar] [CrossRef]
- Wong, C.C.; Liu, C.C.; Xiao, S.R.; Yang, H.Y.; Lau, M.C. Q-Learning of straightforward gait pattern for humanoid robot based on automatic training platform. Electronics 2019, 8, 615. [Google Scholar] [CrossRef][Green Version]
- Pratt, J.; Carff, J.; Drakunov, S.; Goswami, A. Capture point: A step toward humanoid push recovery. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Genova, Italy, 4–6 December 2006; pp. 200–207. [Google Scholar]
- Koolen, T.; Boer, T.D.; Rebula, J.; Goswami, A.; Pratt, J. Capturability based analysis and control of legged locomotion, Part 1: Theory and application to three simple gait models. Int. J. Robot. Res. Res. 2012, 31, 1094–1113. [Google Scholar] [CrossRef]
- Kasaei, M.; Lau, N.; Pereira, A. An optimal closed-loop framework to develop stable walking for humanoid robot. In Proceedings of the IEEE International Conference on Autonomous Robot Systems and Competitions, Torres Vedras, Portugal, 25–27 April 2018; pp. 30–35. [Google Scholar]
- Zhao, F.; Gao, J. Anti-slip gait planning for a humanoid robot in fast walking. Appl. Sci. 2019, 9, 2657. [Google Scholar] [CrossRef][Green Version]
- Adiwahono, A.H.; Chew, C.M.; Liu, B. Push recovery through walking phase modification for bipedal locomotion. Int. J. Hum. Robot. 2013, 10, 1350022. [Google Scholar] [CrossRef]
- Yu, W.; Zhuang, R.; Shao, Z. Balance recovery analysis with constraints of feet-ground for biped robot. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 6–9 August 2017; pp. 1597–1601. [Google Scholar]
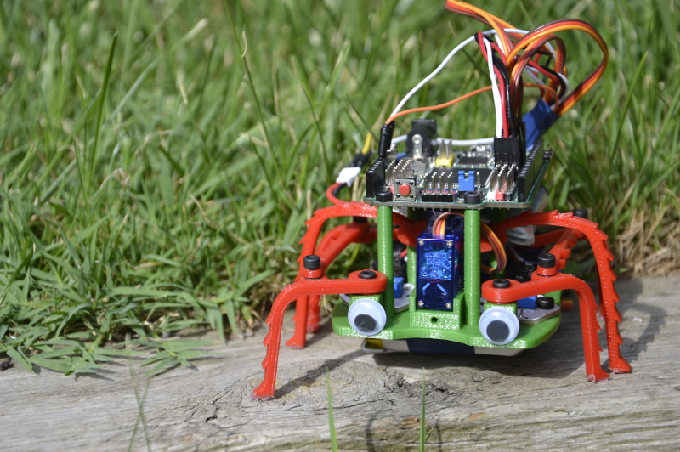
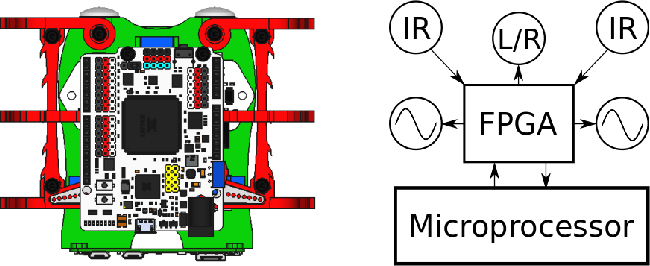
برای دانلود پروژه نمونه معماری ترکیبی الهام گرفته شده زیستی برای ربات های رونده از طریق مولدهای الگوی مرکزی با استفاده از FPGA های منبع باز به همراه شبیه سازی، اینجا کلیک کنید.

پروژه مشابه دارید؟
برای ثبت سفارش در سیمیا می توانید از طریق اپلیکیشن سیمیا، یا فرم ثبت سفارش در سایت اقدام کرده و یا از طریق ایمیل، واتساپ، تلگرام و اینستاگرام اقدام نمایید.
اپلیکیشن سیمیا را از بازار و مایکت دانلود کنید.


سریع ترین راه پاسخگویی سیمیا، واتساپ و سروش می باشد. لینک واتساپ، اینستاگرام و تلگرام در پایین سایت وجود دارد.
09392265610
نشانی ایمیل سیمیا simiya_ht@yahoo.com می باشد.
از برقراری تماس برای هماهنگی پروژه خودداری کنید، حجم بالای سفارشات به ما اجازه نمی دهد تا از طریق تلفن پاسخگوی شما عزیزان باشیم، حتما درخواست خود را به صورت مکتوب و از طریق یکی از راه های ذکر شده فوق ارسال نمایید، درخواست خود را به طور کامل و با تمام فایل ها و توضیحات لازم ارسال نمایید تا مدت زمان بررسی آن به حداقل برسد. پس از تعیین کارشناس، در اسرع وقت به شما پاسخ می دهیم.